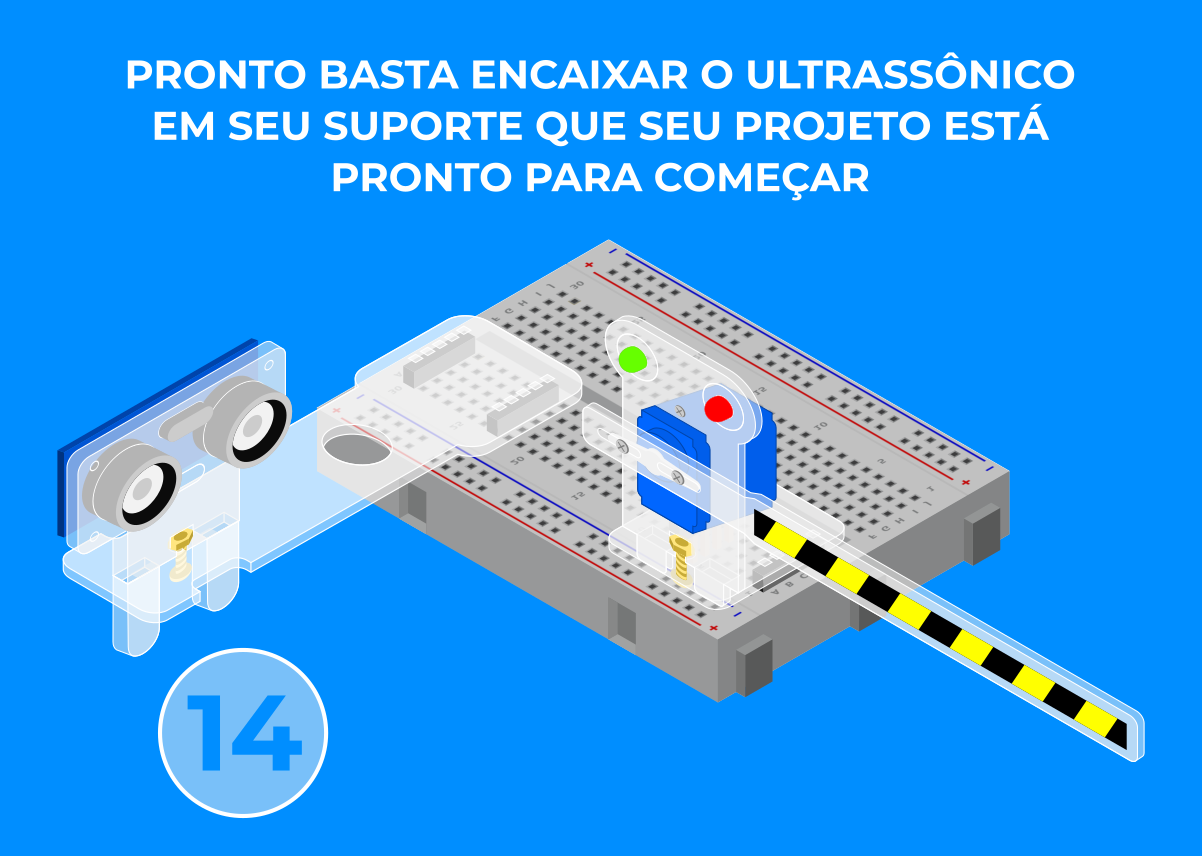
O kit Arduino que simula uma cancela eletrônica oferece uma abordagem prática e envolvente para o aprendizado de eletrônica e automação. Utilizando um sensor ultrassônico, este kit detecta a presença de um objeto, acionando um servo motor para abrir e fechar a cancela de forma automática. Os componentes são fixados em acessórios de acrílico, que não apenas garantem uma montagem organizada e segura, mas também conferem uma aparência profissional ao projeto. Esta estrutura em acrílico facilita a visualização do funcionamento interno, tornando o kit ideal para uso didático em salas de aula, laboratórios e workshops.
As vantagens educacionais incluem a oportunidade de aprender sobre sensores, atuadores e a integração de hardware e software, além de estimular habilidades práticas de montagem e programação. Este kit é uma ferramenta valiosa para ensinar conceitos de automação e controle de acesso, proporcionando uma experiência de aprendizado interativa e prática.


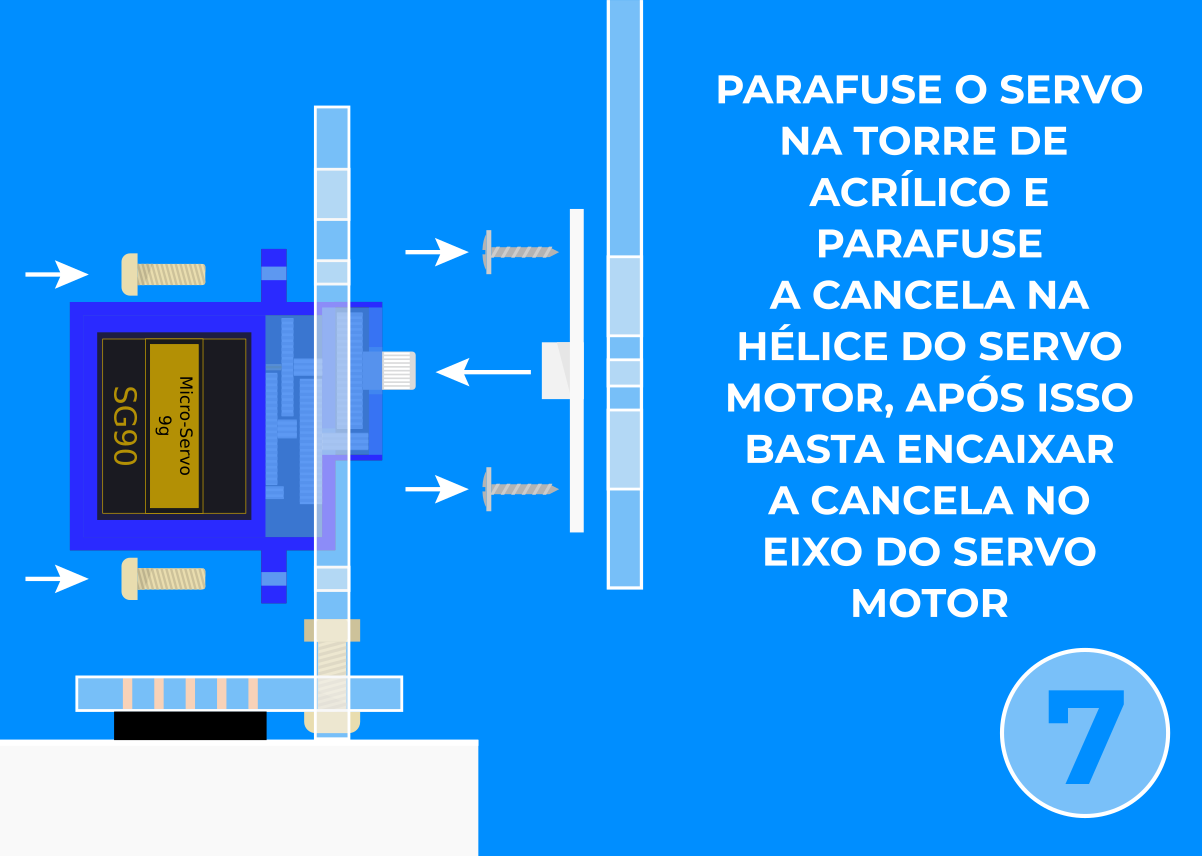
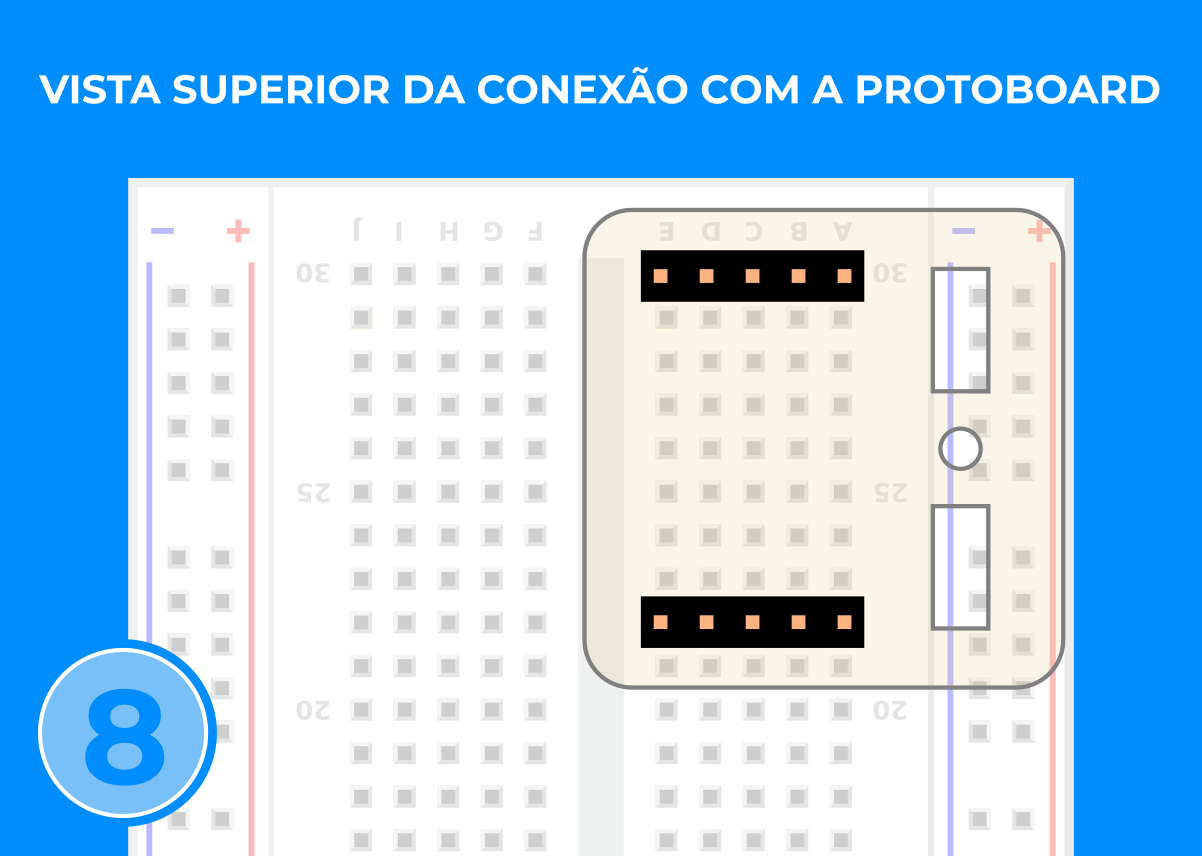
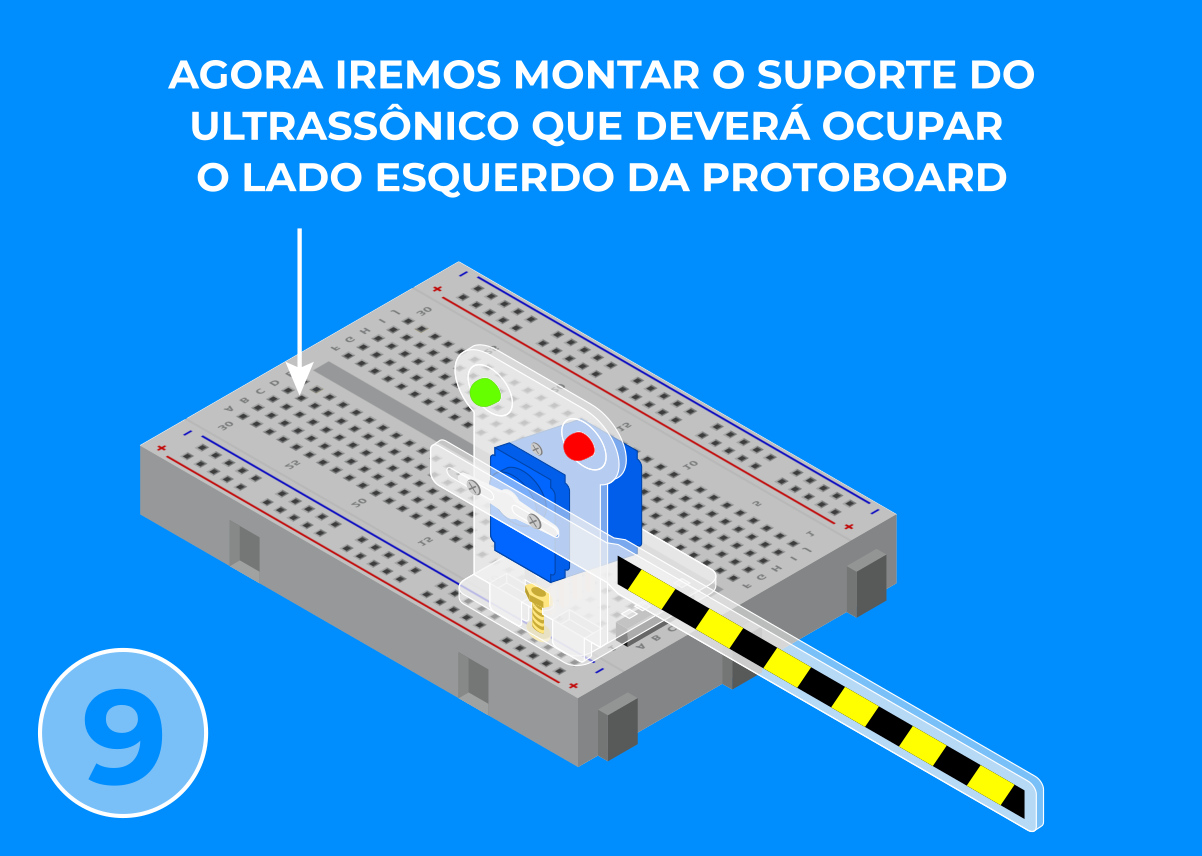
O kit acompanha um Arduino SMD, uma protoboard de 400 pontos e uma base de acrílico utilizada para fixação dos mesmos, garantindo uma montagem estável e organizada. Além disso, inclui dois suportes de acrílico para suporte do sensor ultrassônico e o servo motor, conta também com uma cancela em acrilico que deverá ser fixada ao eixo do servo motor.
Este kit conta também com dois leds que para a indentificação se a cancela esta aberta ou fechada.
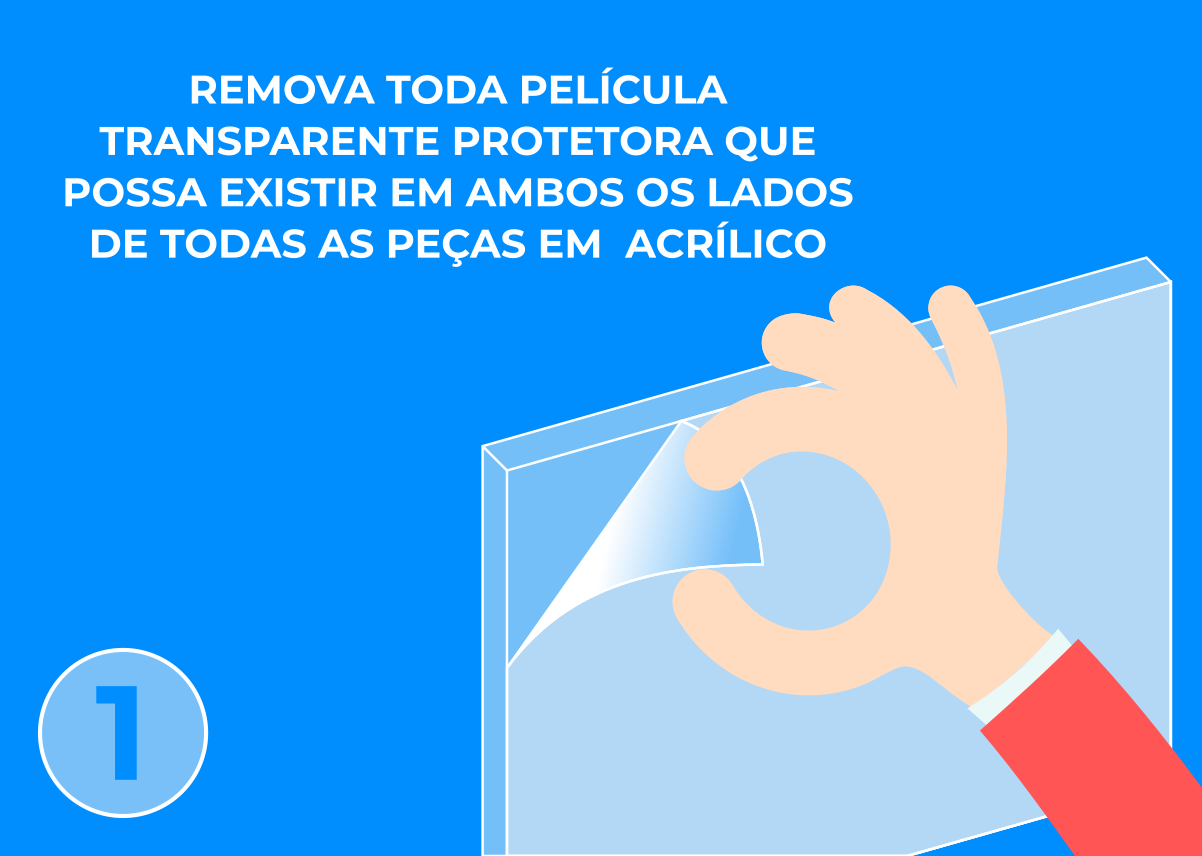
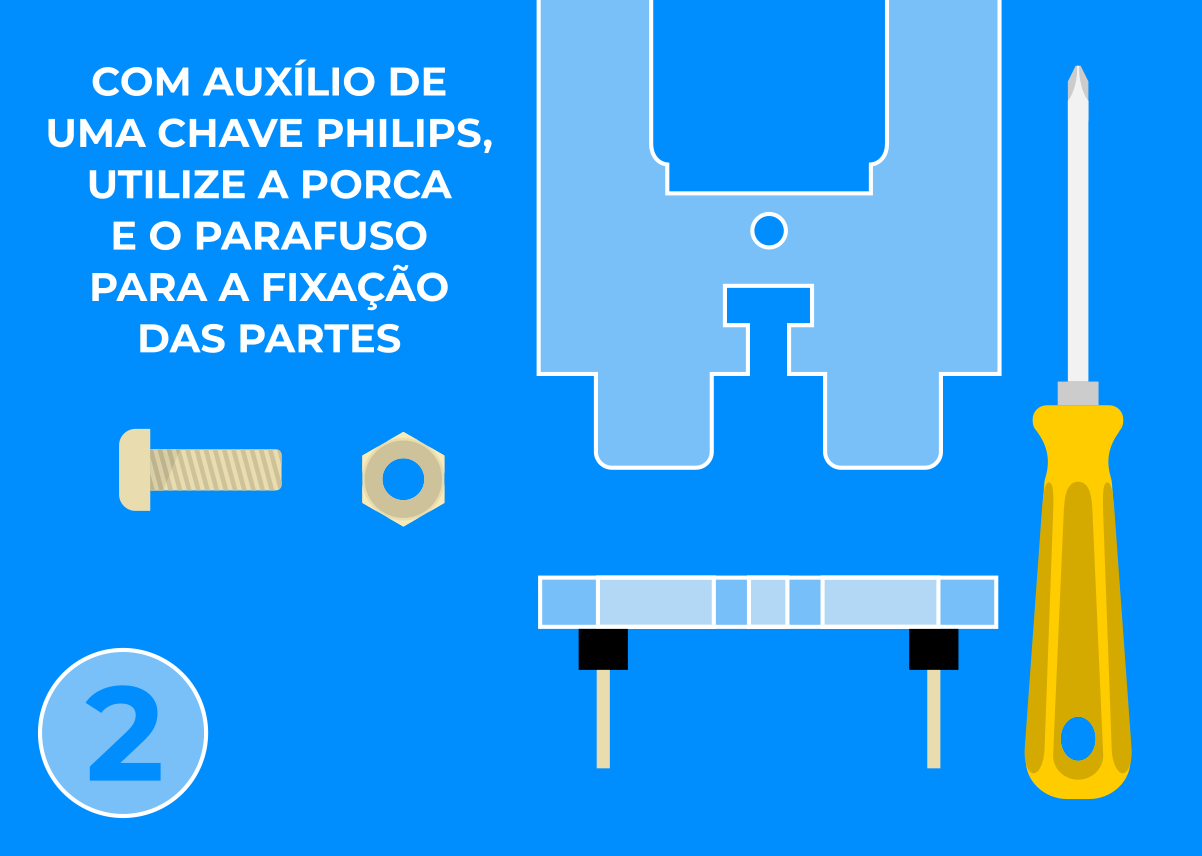
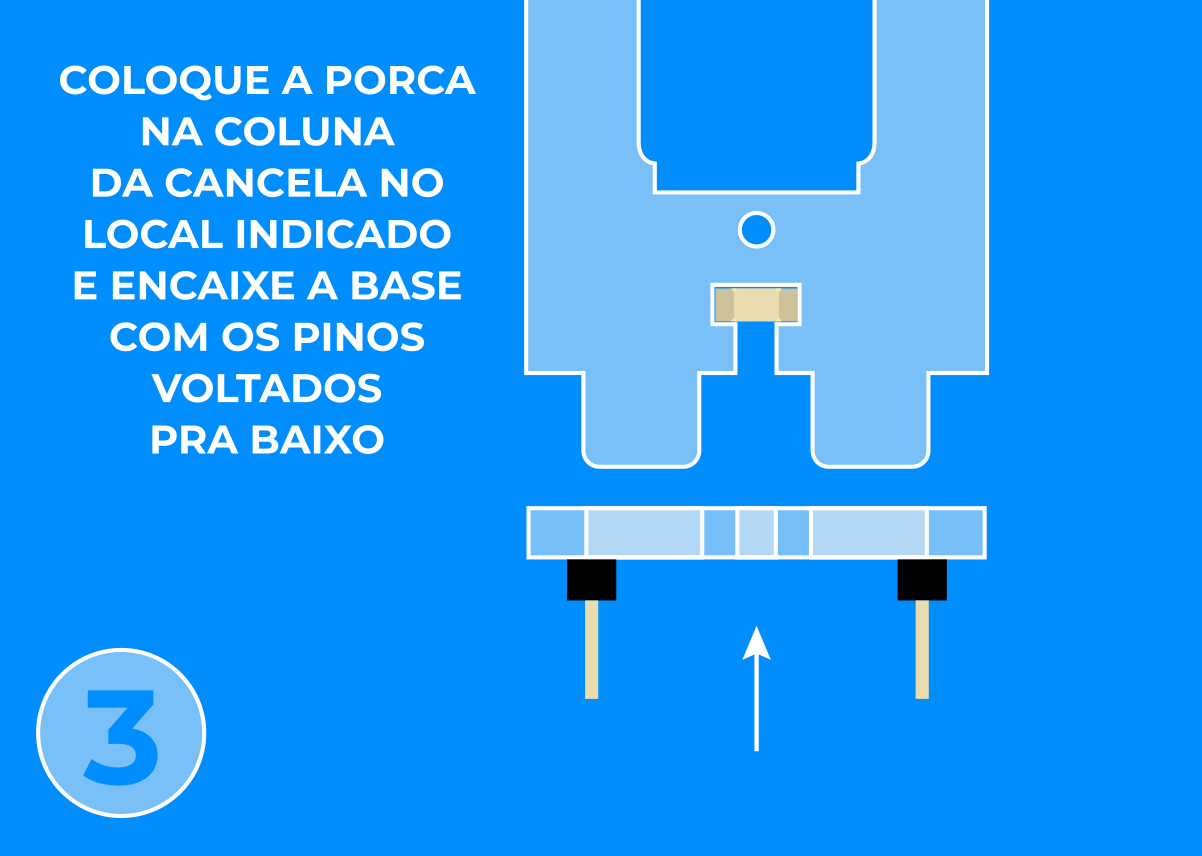
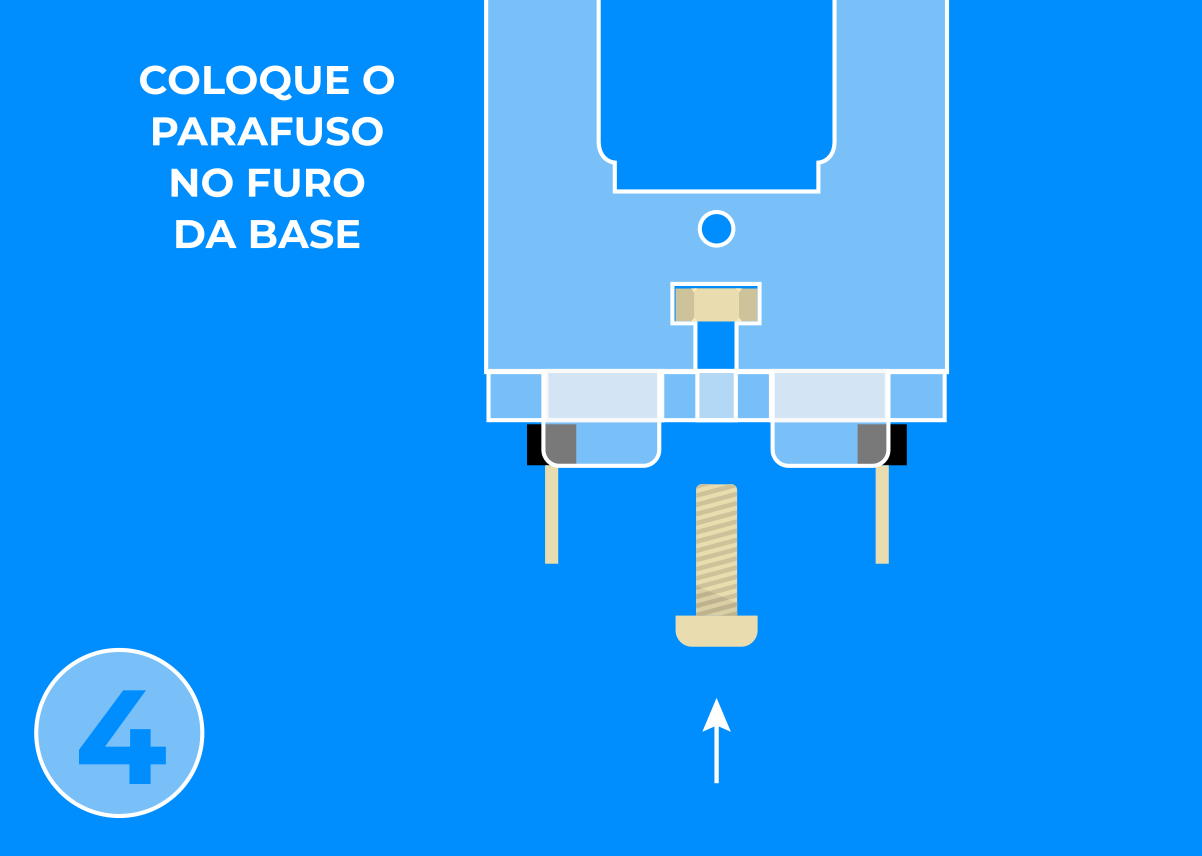
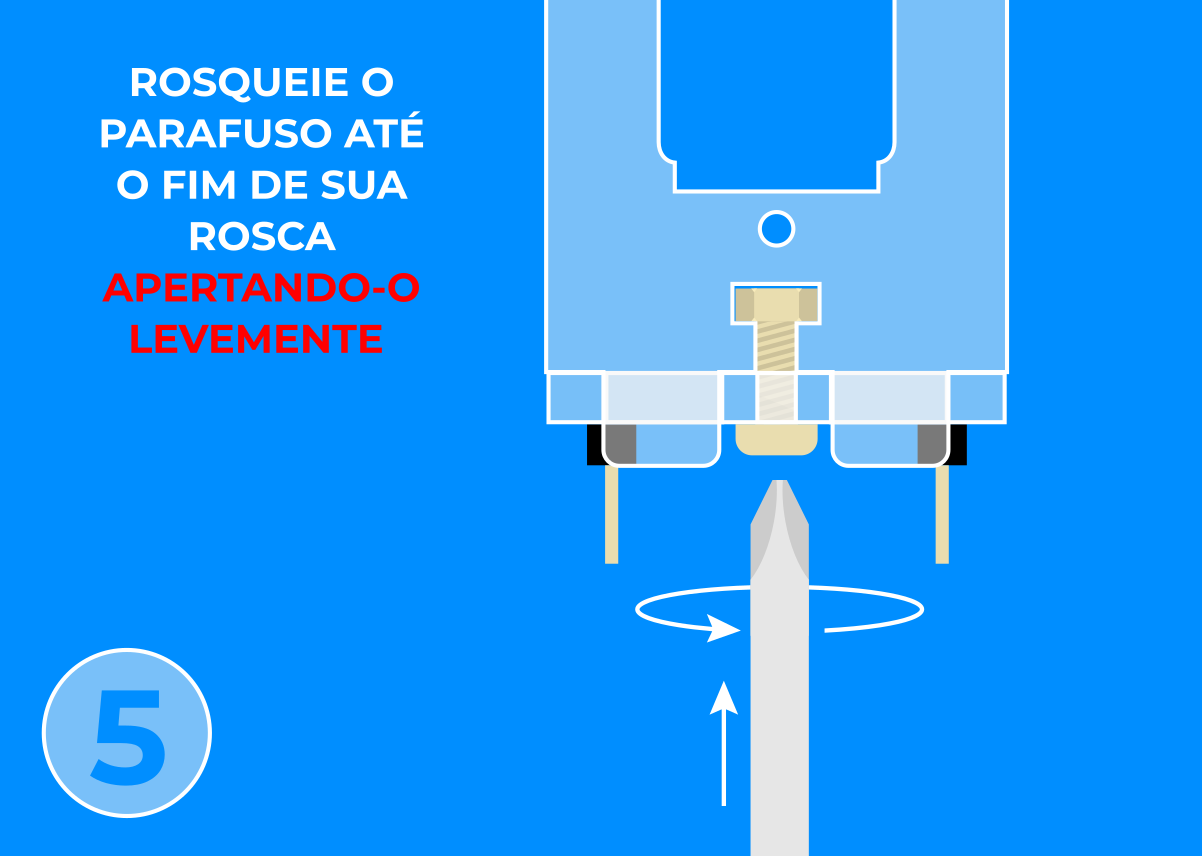
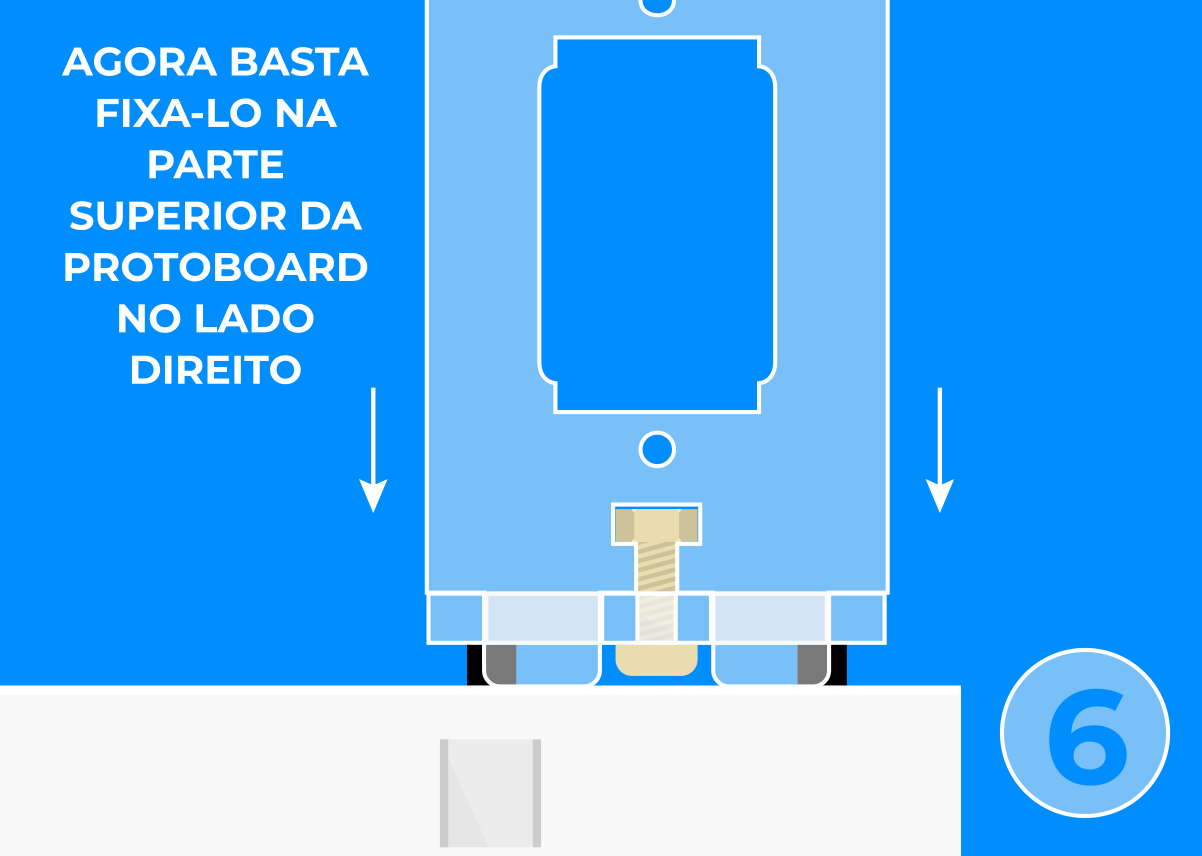
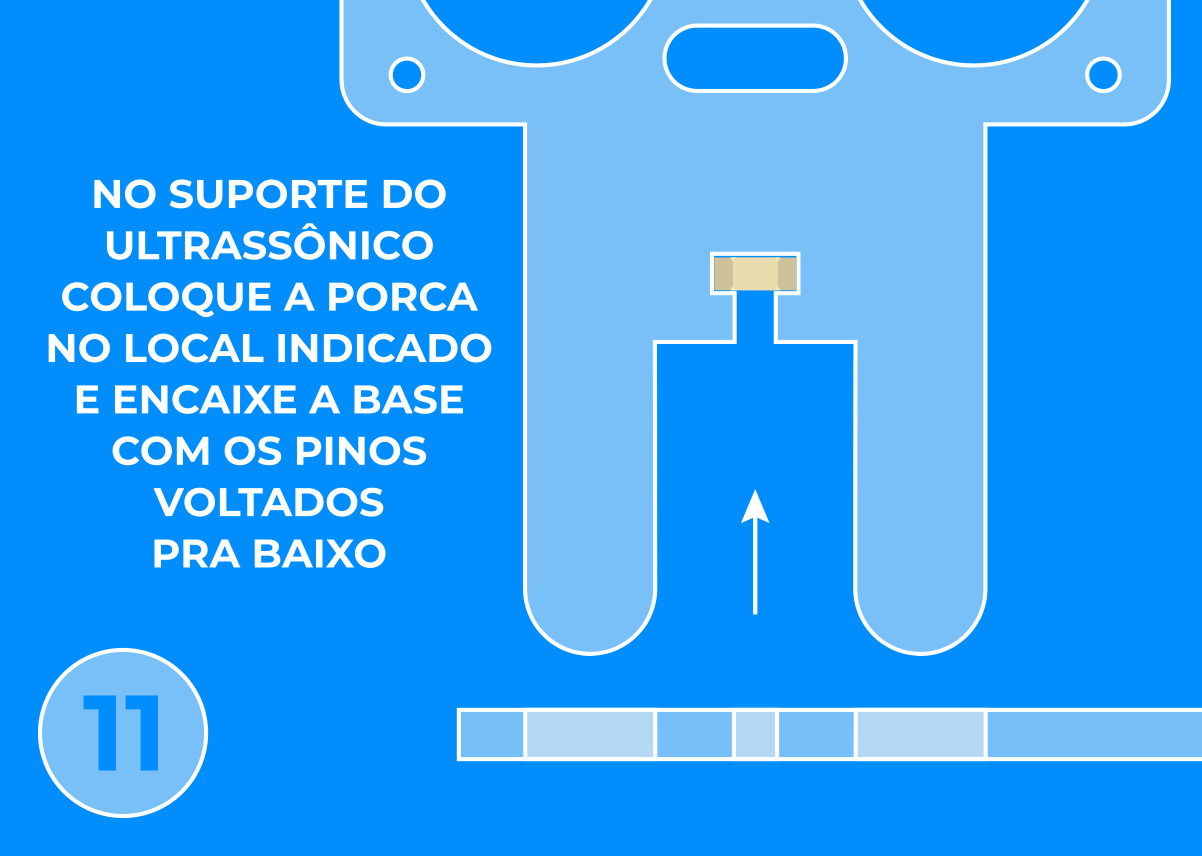
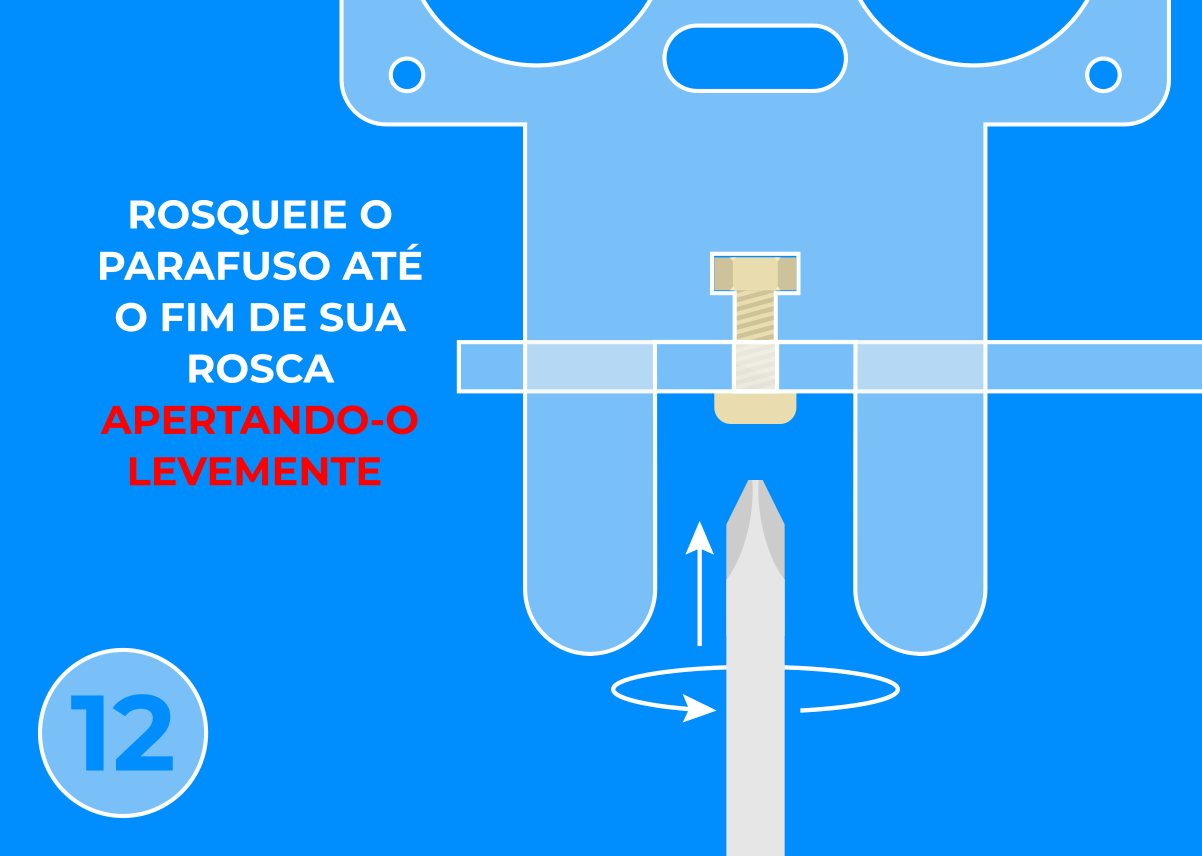
O kit completo em acrílico inclui uma base para a placa Arduino e uma protoboard, além de acessórios como parafusos, espaçadores e pés de silicone. Veja nesta página mais detalhes sobre a base e como montá-la corretamente. O kit também conta com todas as outras peças em acrílico e os acessórios necessários para a organização dos componentes, incluindo bases com pinos fixadores, parafusos e porcas.
ONDE COMPRAR


#include <Servo.h> // Inclui a biblioteca Servo para controlar o servo motor
Servo myservo; // Cria um objeto servo para controlar o servo motor
const int trigPin = 3; // Define o pino do sensor ultrassônico TRIG como 3
const int echoPin = 4; // Define o pino do sensor ultrassônico ECHO como 4
const int ledVerde = 5; // Define o pino do LED verde como 5
const int ledVermelho = 6; // Define o pino do LED vermelho como 6
long tmeduration; // Variável para armazenar o tempo de duração do pulso ultrassônico
int distance; // Variável para armazenar a distância calculada
void setup() {
myservo.attach(9); // Anexa o servo motor ao pino 9
pinMode(ledVerde, OUTPUT); // Define o pino do LED verde como saída
pinMode(ledVermelho, OUTPUT); // Define o pino do LED vermelho como saída
pinMode(trigPin, OUTPUT); // Define o pino TRIG do sensor ultrassônico como saída
pinMode(echoPin, INPUT); // Define o pino ECHO do sensor ultrassônico como entrada
Serial.begin(9600); // Inicializa a comunicação serial a 9600 bps
}
void loop() {
// Envia um pulso ultrassônico
digitalWrite(trigPin, LOW);
delayMicroseconds(500);
digitalWrite(trigPin, HIGH);
delayMicroseconds(500);
digitalWrite(trigPin, LOW);
// Calcula a duração do pulso ultrassônico retornado
tmeduration = pulseIn(echoPin, HIGH);
// Calcula a distância com base no tempo de duração do pulso
distance = (0.034 * tmeduration) / 2;
// Verifica se a distância é menor ou igual a 10 cm
if (distance <= 10) {
// Abre a cancela (servo motor a 90 graus)
myservo.write(90);
// Desliga o LED vermelho
digitalWrite(ledVermelho, LOW);
// Liga o LED verde
digitalWrite(ledVerde, HIGH);
// Espera 4 segundos
delay(4000);
} else {
// Fecha a cancela (servo motor a 0 graus)
myservo.write(0);
// Liga o LED vermelho
digitalWrite(ledVermelho, HIGH);
// Desliga o LED verde
digitalWrite(ledVerde, LOW);
}
// Imprime a distância calculada na serial
Serial.print("distance:");
Serial.println(distance);
// Espera 100 milissegundos antes de repetir o loop
delay(100);
}

Se você já possui os componentes eletrônicos e deseja adquirir apenas as peças avulsas em acrílico conforme suas necessidades, clique no botão abaixo.